
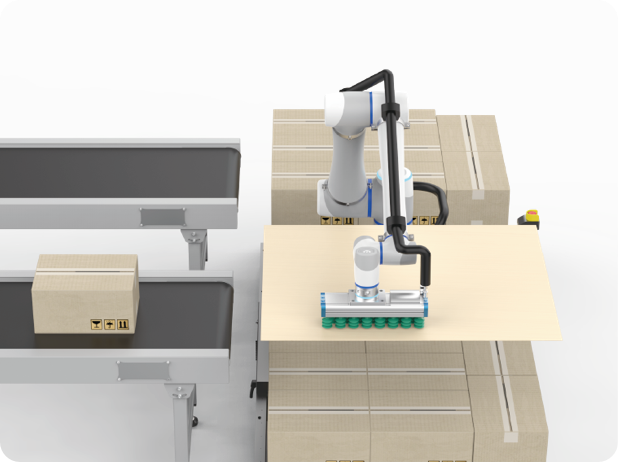
Smarte Lösung zum Palettieren




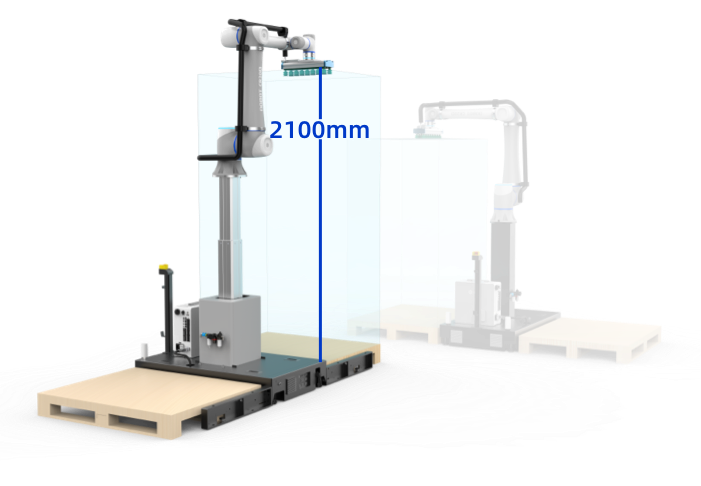
![2.100 mm<sup>[1]</sup><br>Max. Palettierhöhe](/media/upload/2024/01/apply/two33.png)
![30 Min<sup>[2]</sup><br>In Produktion gehen](/media/upload/2024/01/apply/two44.png)
![8-10 Monate<sup>[4]</sup><br>Schnelle Amortisation](/media/upload/2024/01/apply/two55.png)

Die hohe Arbeitsintensität birgt das Potenzial für körperliche Belastung
und Verletzungsrisiken
Ineffizienzen können zu einem langsamen Arbeitsablauf und
geringerer Produktivität führen
Inkonsistenzen erhöhen das Risiko von Beschädigungen an Gütern oder Geräten
Die begrenzte Ladekapazität und Palettierhöhe stellen zusätzliche Herausforderungen dar

Die hohe Arbeitsleistung durch einen Rund-um-die-Uhr-Betrieb
verbessert die Gesamtausgabe
Konsistente Genauigkeit führt zu einer besseren Qualität
Die verbesserte Arbeitssicherheit und die reduzierten Arbeitskosten tragen
zu einer effizienteren Arbeitsumgebung bei
Flexibilität und Anpassungsfähigkeit ermöglichen eine stets an
veränderte Anforderungen anpassbare Lösung

Leistungsstark und als Experte in der Palettierung anerkannt, bietet die Lösung herausragende Ergebnisse.
Benutzerfreundlich und funktionsreich
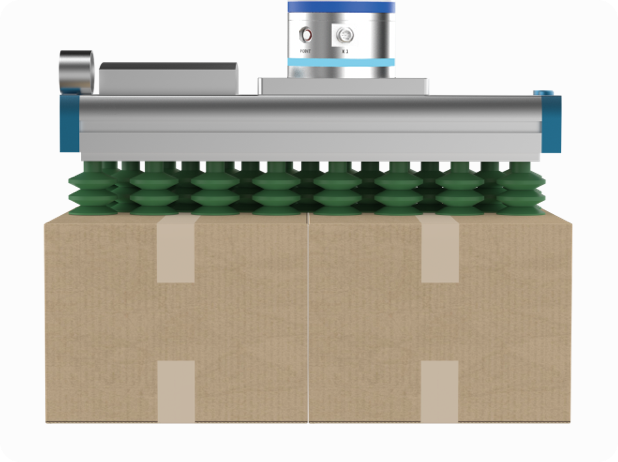
Hohe Effizienz wird durch den Einsatz von doppelten Vakuumsaugern gewährleistet.
Die Palettierlösung unterstützt den Modus mit doppelten Vakuumsaugern, wodurch gleichzeitig zwei Boxen für die Palettierung aufgenommen werden können. Dies ermöglicht eine Palettierleistung von bis zu 13 Picks/Min und führt zu einer Effizienzsteigerung von bis zu 62,5%.[3]
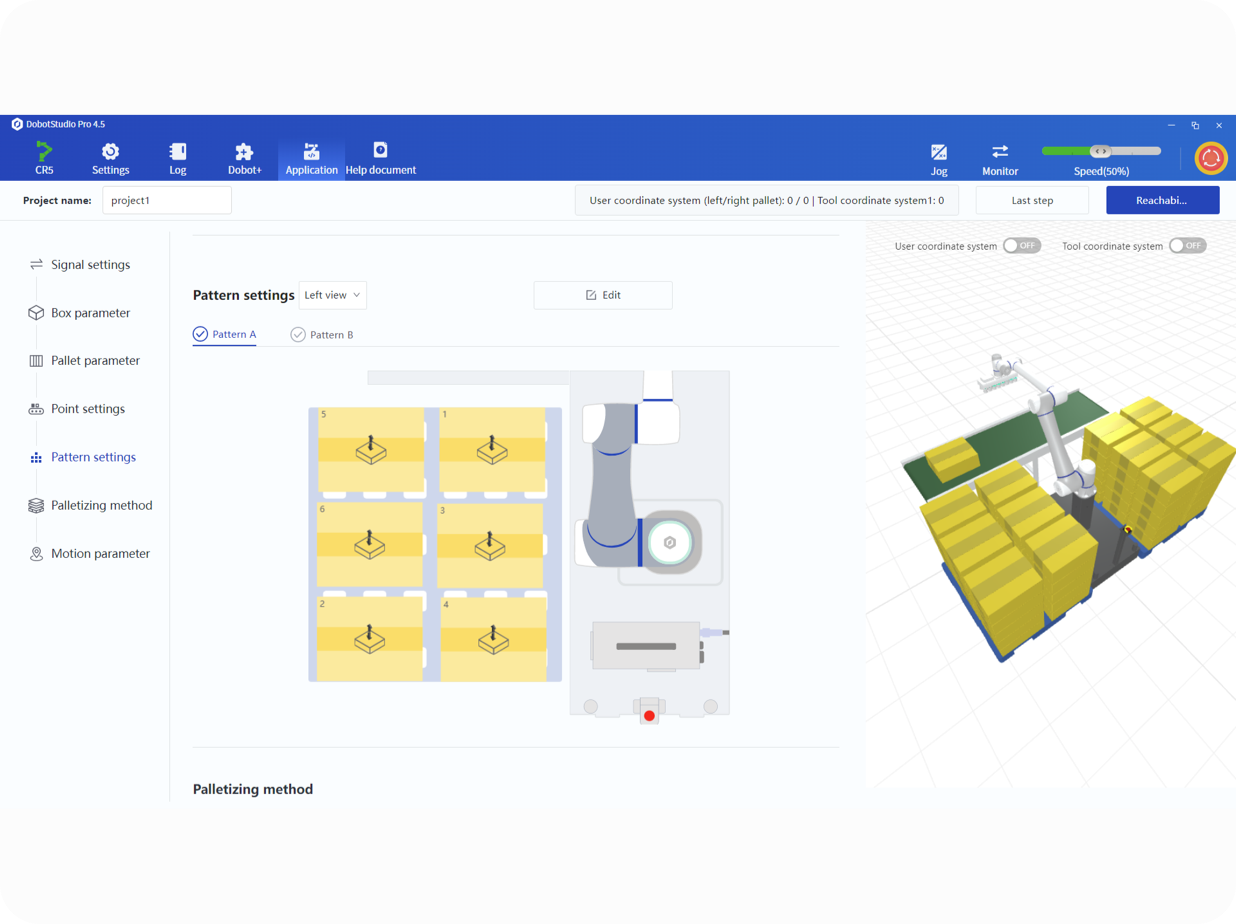
Visueller Konfigurationsprozess
Das Prozesspaket ist mit einer intuitiven Konfigurationsoberfläche und 3D-Anzeige ausgestattet, die eine rasche Einrichtung von Kartons, Paletten und Stapelmustern erlaubt. Dabei erfolgt eine Echtzeitvisualisierung im 3D-Vorschau-Fenster, was die gesamte Anwendungskonfiguration einfach und unkompliziert gestaltet.
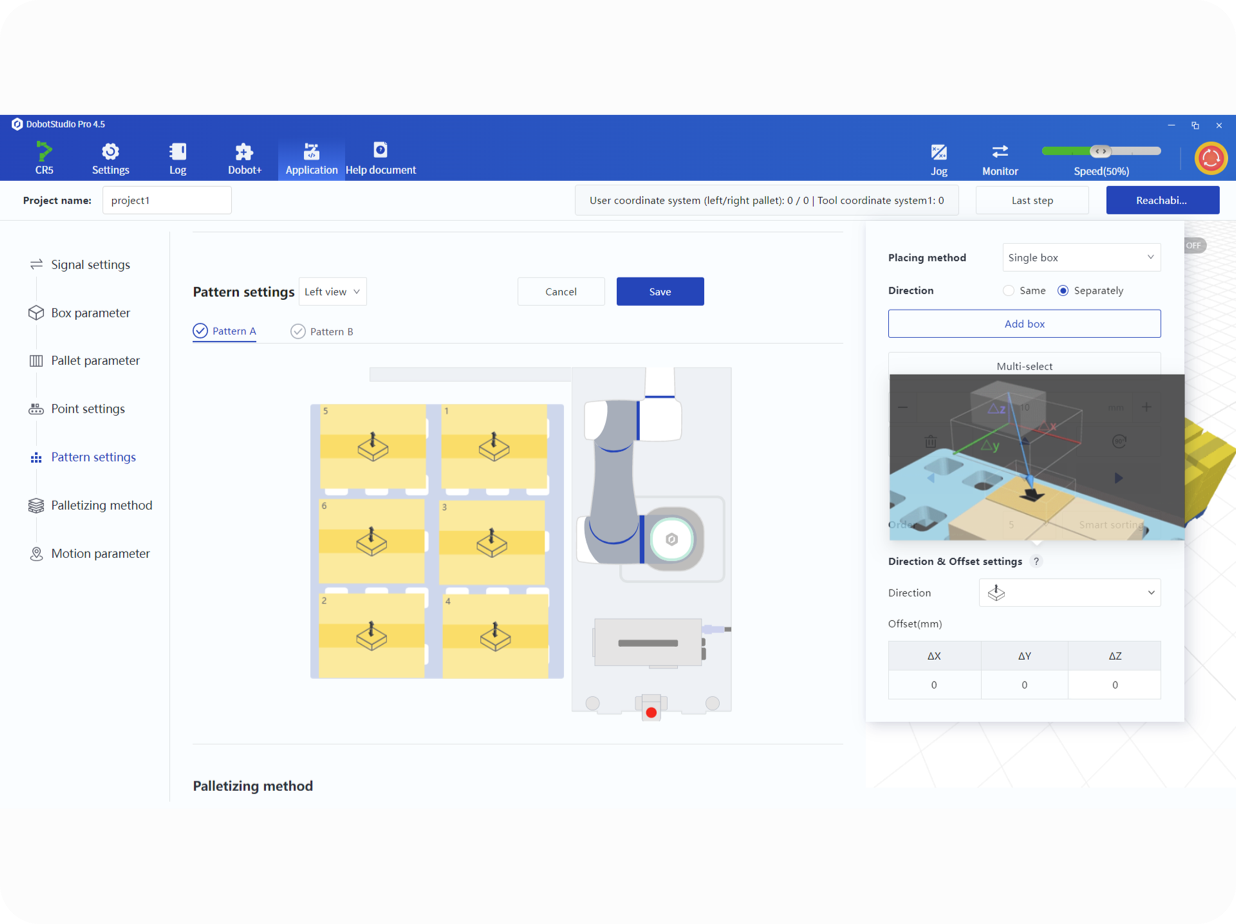
Ermöglicht die Konfiguration des Übergangspunkts und des Zielpunkts für Kartons.
Die Palettierlösung ermöglicht die Festlegung des Palettierungspunkts und des Übergangspunkts für den Karton. Auf diese Weise kann der Einfluss von Größenunterschieden zwischen Karton und der Höhendifferenz der Palette minimiert werden, ohne dass übermäßiger Zwischenraum für den Karton reserviert werden muss. Dies führt zu einer kompakteren Anordnung der Kartons. Für jeden Karton kann der Palettierungspunkt und der Übergangspunkt separat festgelegt werden, was die Konfiguration besonders flexibel gestaltet.
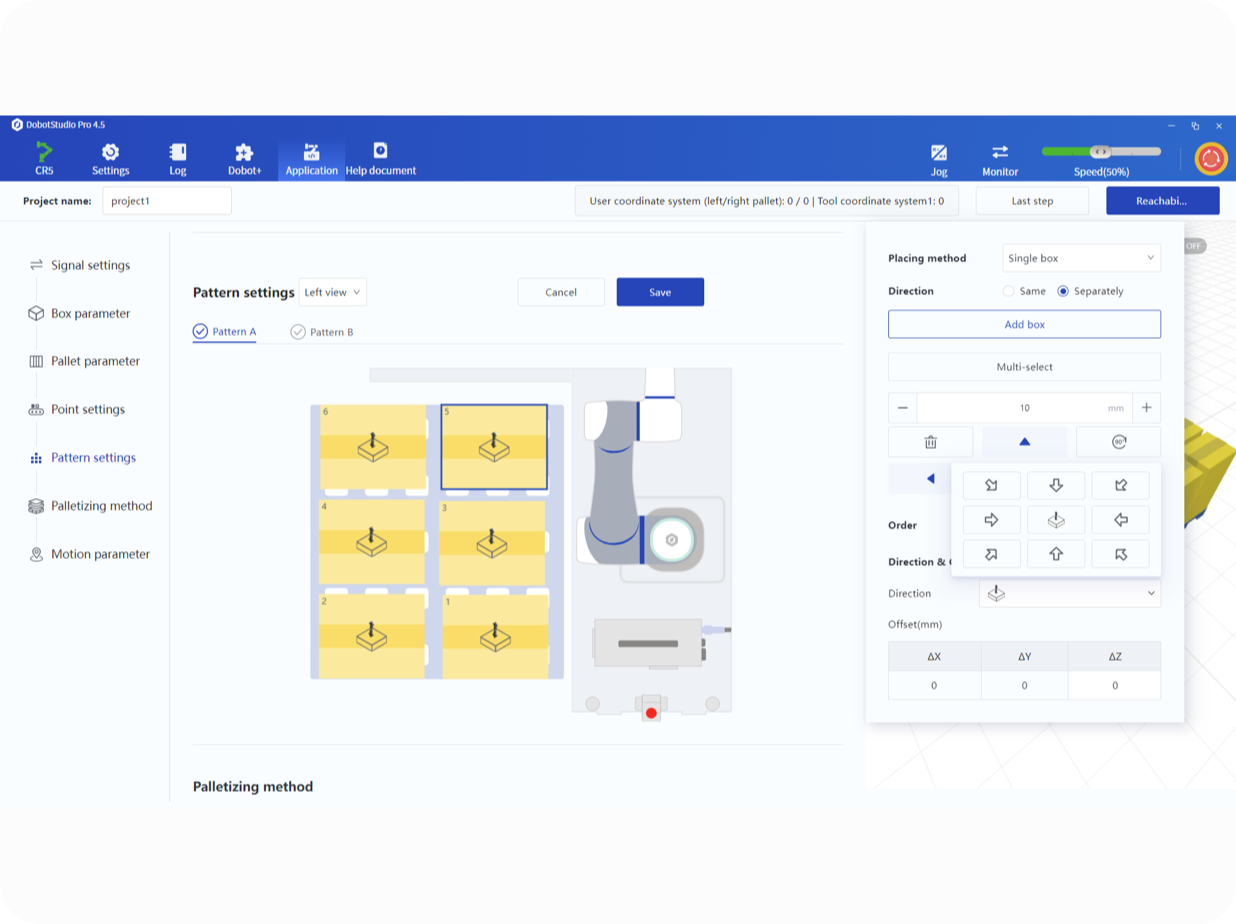
Flexible Musterkonfiguration
Die Palettierlösung bietet die Möglichkeit, die Reihenfolge der Kartonpalettierung und die Einfahrrichtungen von 8 Kartontypen anzupassen, was besonders für komplexe Palettierszenarien geeignet ist.
Unterstützt Zwischenlagen
Als Reaktion auf die Anforderungen der Lebensmittel- und Getränkeindustrien wurde dem Prozesspaket die Unterstützung für Zwischenlagen während des Palettierprozesses hinzugefügt, um die Stapelstabilität zu verbessern. Die Konfiguration der Zwischenlage gestaltet sich unkompliziert und erfordert lediglich drei Schritte: die Festlegung des Abholpunkts, des Übergangspunkts und des Platzierungspunkts.

Ganzheitliche Sicherheitsvorkehrungen
Return on Investment in 8-10 Monaten erreichen.

Die Dobot Palettierstation entlastet Mitarbeiter von wiederholenden und anspruchsvollen Palettieraufgaben, was zu erheblichen Einsparungen bei den Betriebskosten führt.Das Prozesspaket zeichnet sich durch eine benutzerfreundliche Bedienung aus, erfordert keine Fachkenntnisse eines Ingenieurs für die Neukonfiguration und trägt somit dazu bei, die nachfolgenden Wartungskosten zu reduzieren.
Nach der Inbetriebnahme dauert es in der Regel lediglich 8–10 Monate, um die Investitionskosten wieder zu erwirtschaften.[4]

Return on Investment in 8-10 Monaten erreichen.
Versionen
Versionen
Ende des Arms: Optional
des Arms: Optional
Applications Across Industries






Produktbezeichnung |
CR20A Säulen-Stapel-Arbeitsstation |
CR20A Hub-Stapel-Arbeitsstation |
CR10A Hub-Stapel-Arbeitsstation |
| Maximale Tragfähigkeit *[1] | 20kg | 20kg | 10kg |
| Maximale Stapeltaktzeit *[2] |
Einzelabsaugung und -ablage: 9 Stück/Minute Doppelabsaugung und -ablage: 13 Stück/Minute |
Einzelabsaugung und -ablage: 9 Stück/Minute Doppelabsaugung und -ablage: 13 Stück/Minute |
Einzelabsaugung und -ablage: 9 Stück/Minute Doppelabsaugung und -ablage: 13 Stück/Minute |
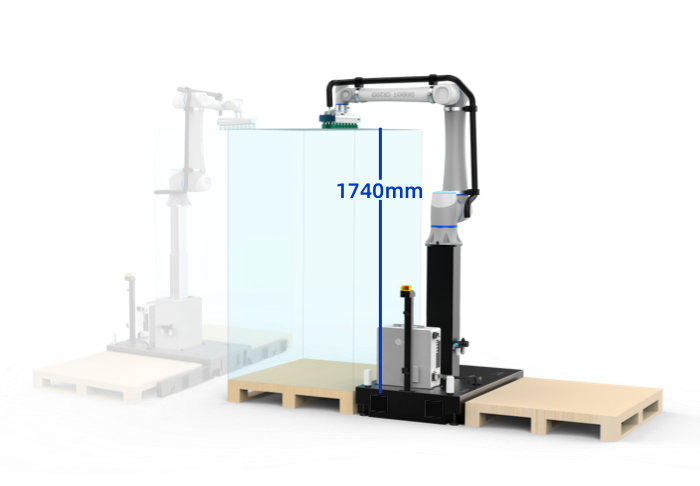
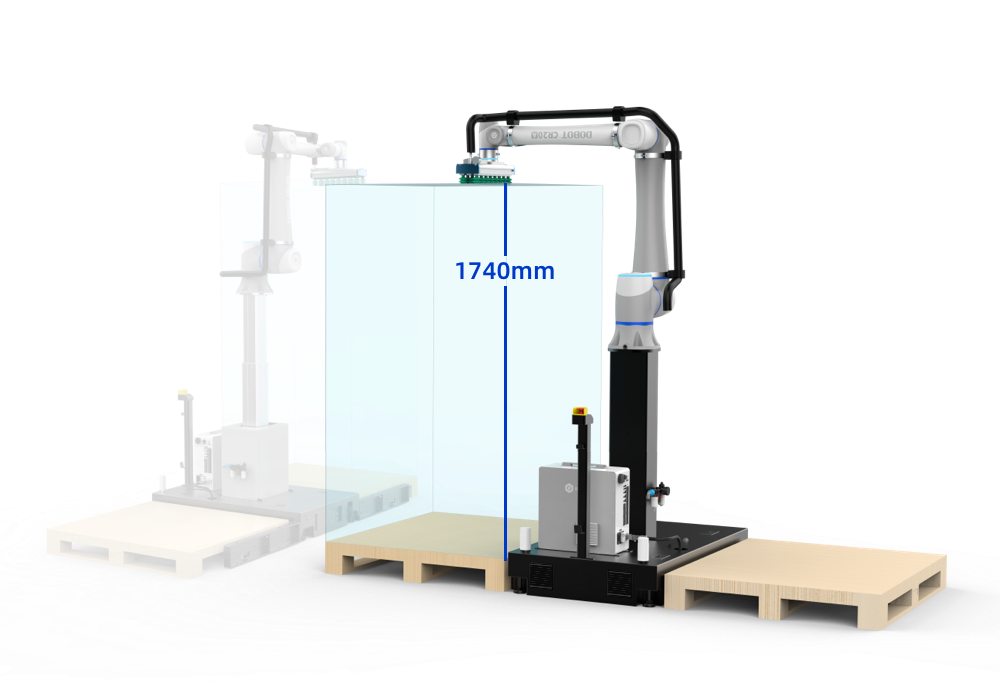
| Maximale Stapelhöhe *[3] | 1740mm | 2100mm | 1800mm |
| Arbeitsradius | 1700mm | 1700mm | 1300mm |
| Nutzfläche | 1350mm * 2220mm | 1350mm * 2220mm | 1350mm * 2220mm |
| Gesamtmaschinengewicht *[4] | 300kg | 300kg | 300kg |
| Nennspannung |
AC 100-240V 50/60Hz |
AC 100-230V 50/60Hz |
AC 100-230V 50/60Hz |
| Max. Strom | 16A | 16A | 10A |
| Typische Leistung | 3000W | 3000W | 2000W |
| Temperaturbereich | 10℃-50℃ | 10℃-50℃ | 10℃-50℃ |
| Schutzart |
Roboter-Körper: IP54, Stapel-Arbeitsstation: IP20 |
Roboter-Körper: IP54, Stapel-Arbeitsstation: IP20 |
Roboter-Körper: IP54, Stapel-Arbeitsstation: IP20 |
| Zertifizierung | EU:CE US:FCC CAN:ICES-003 |
EU:CE US:FCC CAN:ICES-003 |
EU:CE US:FCC CAN:ICES-003 |
|
*1. Ohne das Eigengewicht des Endgreifers |
|||
|
*2. Die tatsächliche Stapelgeschwindigkeit hängt von dem Gewicht, der Größe, der Anordnung der Kiste usw. ab |
|||
|
*3. Die Größe und Anordnung der Kiste kann die tatsächliche Stapelhöhe beeinflussen |
|||
|
*4. Ohne das Gewicht des Roboterarms und des Endstücks |
|||
Produktbezeichnung |
CR20A Säulen-Stapel-Arbeitsstation |
CR20A Hub-Stapel-Arbeitsstation |
CR10A Hub-Stapel-Arbeitsstation |
| CR10A Robot | - | - | √ |
| CR20A Robot | √ | √ | - |
| Roboterschaltschrank | √ | √ | √ |
| Basis der Stapel-Arbeitsstation | √ | √ | √ |
| Hebesäule | - | √ | √ |
| Säule | √ | - | √ |
| Stapelpaket | √ | √ | √ |
| Tablet | Optional | Optional | Optional |
| Programmierhandgerät | Optional | Optional | Optional |
| Endgreifer | Optional | Optional | Optional |
Nehmen Sie Kontakt auf mit den Dobot-Experten
Beteiligen Sie sich an der Umgestaltung der Automatisierung. Lassen Sie uns gemeinsam für eine effizientere Zukunft arbeiten.